
Méthodologie des essais GNSS
Record and Replay ou Record and Playback, une technique d’essais bien adaptée à la géolocalisation dans les environnements contraints
Spécifités des tests GNSS et méthodologies
Le domaine de la géolocalisation s’est doté d’une méthodologie de référence indispensable pour évaluer et caractériser des terminaux GNSS destinés à la navigation terrestre.
La série de normes EN16803 a pour objectif d’éclairer les choix des utilisateurs et de simplifier l’intégration des technologies satellitaires aux systèmes embarqués. Elle s’appuie sur une technique de métrologie instrumentale, identifiée sous le terme « Record & Replay » et offrant plusieurs avantages-clefs :
- Restituer des environnements d’essais « Reproductibles » et « Représentatifs » du monde réel ;
- Dissocier les erreurs de « Justesse » et de « Fidélité » pour enrichir les analyses ;
- Etablir des scénarios de référence fiables pour « comparer les résultats de mesures ».
Erreurs de positionnement, signal dégradé et masquage environnemental
Dans un monde parfait, les positions calculées par trilatération en utilisant les signaux transmis par les satellites seraient toujours centimétriques. Malheureusement, outre la qualité intrinsèque des récepteurs, de nombreux facteurs viennent altérer les mesures réalisées par un récepteur GNSS et dégrader l’information de géolocalisation finale.
Pour commencer, le système GNSS lui-même souffre de multiples imperfections, avec des erreurs dites “Globales”. A dessein, le système satellitaire de navigation est mis sous contrôle avec la diffusion de messages d’assistance pour augmenter les performances des récepteurs compatibles avec les systèmes SBAS, comme EGNOS pour le continent européen.
Ensuite pour les applications terrestres, les signaux satellitaires sont affectés par plusieurs phénomènes provoqués par l’environnement immédiat de l’antenne du récepteur. Ce sont les erreurs dites “Locales”, comme le relief, les ponts, les infrastructures, la végétation et les interférents de tout type. Selon les milieux traversés, les trajectoires calculées par les terminaux s’écartent plus ou moins de celle réellement suivie par le véhicule (antenne), c’est-à-dire, la trajectoire dite de « référence » ou encore appelée « vérité terrain ».
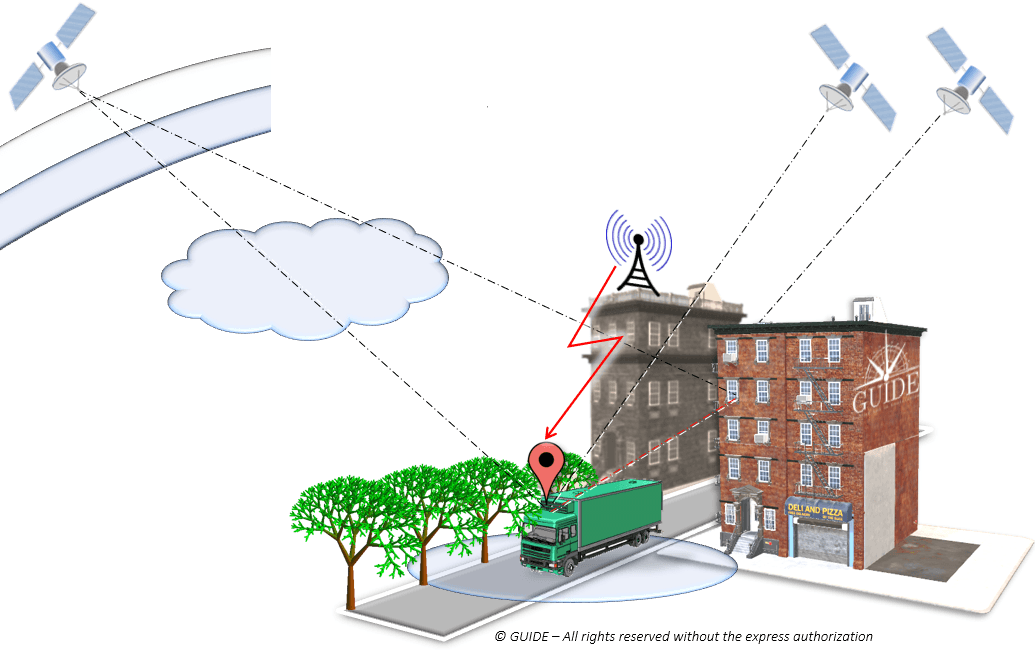
Figure 1 – Sources d’erreur de la géolocalisation en milieu urbain
- Orbites, horloges
- Géométrie des satellites
- Ionosphère, troposphère
ERREURS LOCALES
- Masquages, Atténuations
- Multrajets, diffractions
- Interférences, jamming, etc.
- Chaines de réception
- Algorithmes & Services
- Capteurs de navigation
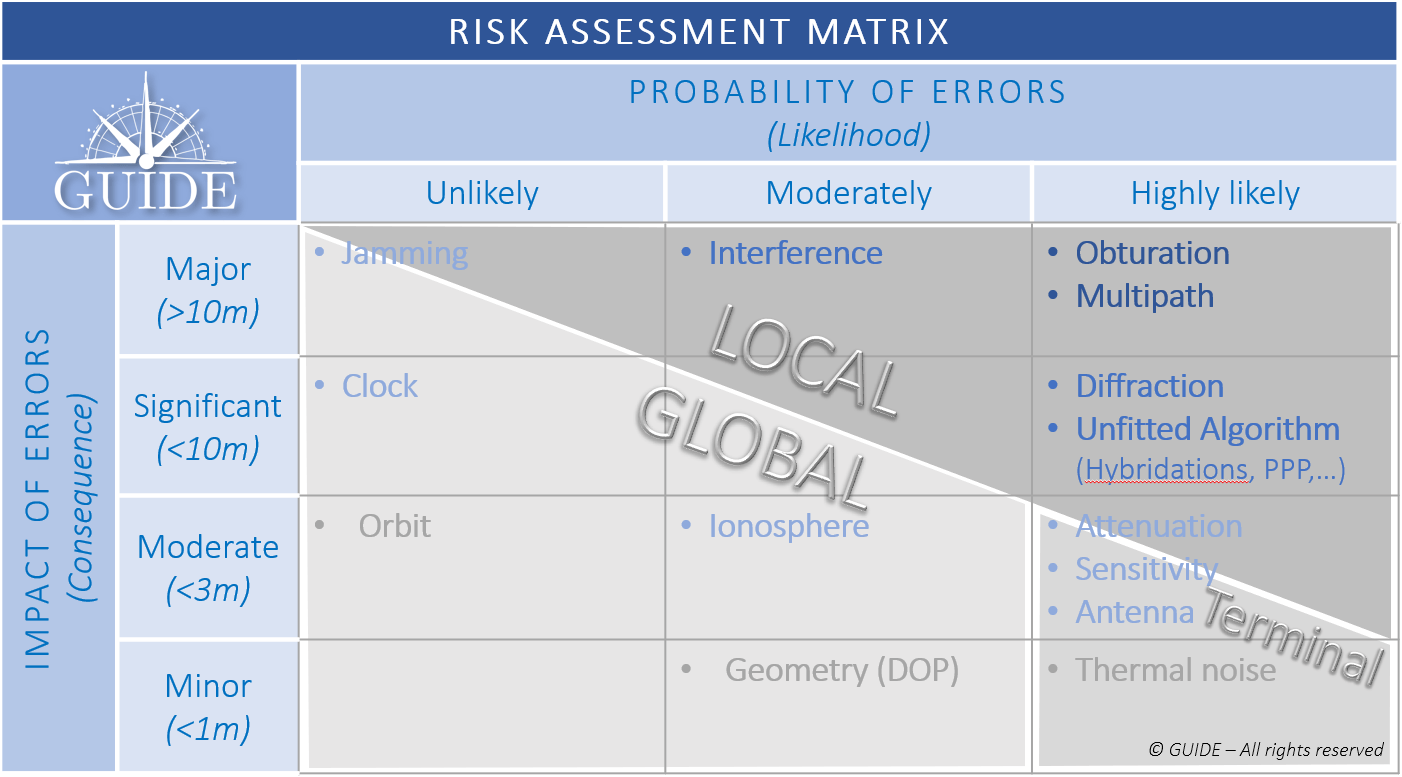
CLASSIFICATION DES ERREURS DE POSITION
Pour étudier les phénomènes les plus impactants et susceptibles de présenter le plus d’occurrences, les différents types d’erreurs sont répartis dans une matrice de risques. Après avoir considéré les erreurs « Globales » comme traitées par le système SBAS régional, il est intéressant de noter la prééminence des erreurs, dites « Locales ». De surcroit, elles viennent s’ajouter aux erreurs Globales et ainsi qu’aux imprécisions intrinsèques par le terminal GNSS.
PROFIL DES PRINCIPALES SOURCES LOCALES D’ERREUR
Pour observer les effets des phénomènes locaux sur la propagation des signaux, une dizaine de récepteurs – identiques, avec la même configuration et partageant la même antenne – est embarquée à bord d’un véhicule pour traverser des zones urbaines et péri-urbaines.
Quatre phénomènes redoutés sont mis en situation pour visualiser les trajectoires des différentes positions calculées par les récepteurs :
Erreurs de position dues aux ponts
Sur l’image, ci-dessous, le véhicule d’essais passe sous un pont à l’aller et au retour. Dans les 2 cas, les trajectoires se dispersent sous le pont et reconvergent plus loin. Ici, il est déjà facile de comprendre les carences des résultats se fondant sur un seul passage, en d’autres termes basés sur une seule mesure.
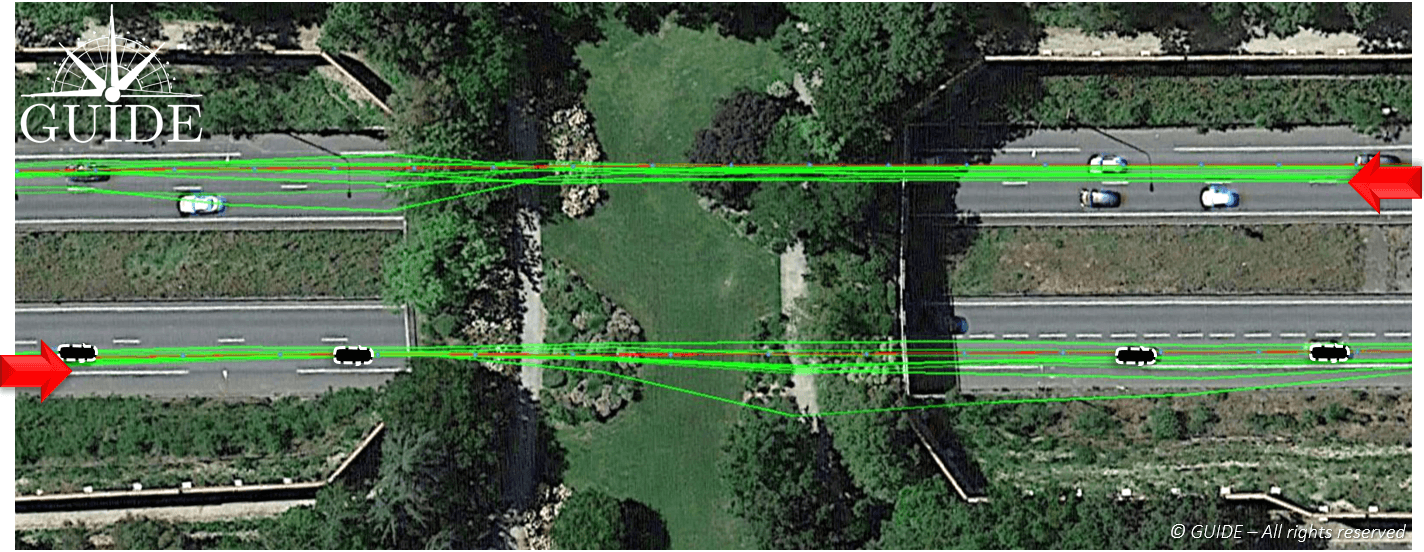
Figure 3 – Effet de l’altération des signaux GNSS sur des récepteurs au passage sous un pont
Erreurs de position dues aux bâtiments
Sur l’image (avec un photomontage pour visualiser le bâtiment principal), ci-dessous, toutes les trajectoires des récepteurs sont tirées vers un immeuble longeant l’avenue. La situation met en évidence les conséquences d’un phénomène appelé « multi-trajet ». Lorsqu’un récepteur accroche des ondes réfléchies, le temps de propagation du signal –utilisé pour calculer les pseudo-distances- est allongé et la précision de la position finale est dégradée. Cet effet est bien connu et facilement observable lors de mesures en position statique.
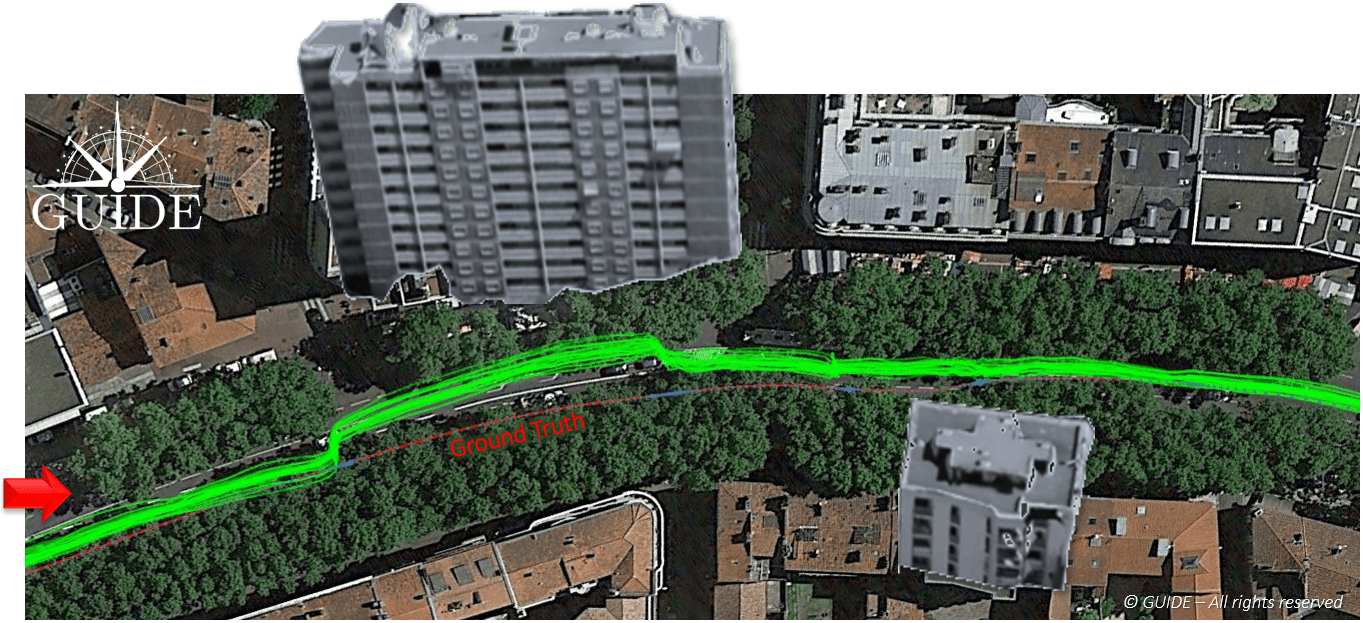
Figure 4 – Effet de la propagation des signaux GNSS sur des récepteurs à proximité d’un immeuble
Erreurs de position dues à la végétation
Sur l’image, ci-dessous, le véhicule d’essais circule sur une avenue recouverte par la canopée des arbres plantés tout le long de l’avenue. Le feuillage atténue et surtout diffracte les ondes satellitaires, atténuant ainsi la qualité de la réception des signaux. Il en résulte une dispersion des trajectoires. Tous les récepteurs fournissent des mesures différentes. A noter qu’en raison de la proximité de bâtiments, le centre de la distribution des positions, en présence de multi-trajets, se détache légèrement par rapport à la trajectoire de référence.
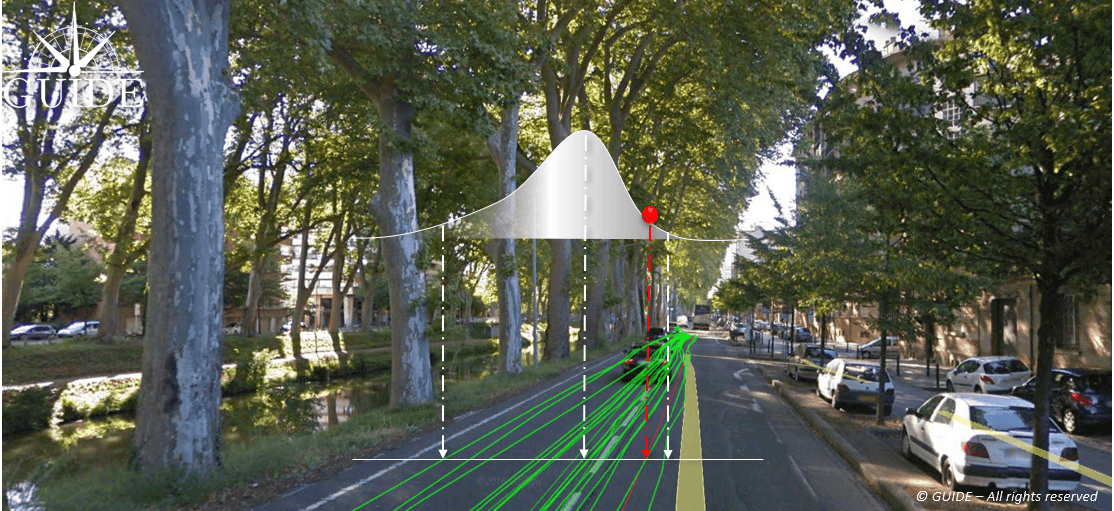
Figure 5 – Effet de la diffraction des signaux GNSS sur des récepteurs au passage sous des feuillages avec une représentation en blanc de la distribution des positions.
Erreurs de position dues à des interférences
Sur l’image, ci-dessous, les récepteurs embarqués ont été perturbés par une interférence « fugitive ». A l’aller, vingt minutes auparavant, aucun problème n’avait été relevé sur les trajectoires de l’autre côté de la voie rapide.
Au retour, cette interférence non identifiée vient dégrader la précision des récepteurs avec une dispersion visible des trajectoires. Dans d’autres situations, des interférences intentionnelles ou non pourraient complètement occulter la bande GNSS et empêcher toute mesure de position.
NB : Dans le cas étudié, la source des interférences semble venir du bas et être guidées par les 2 bâtiments latéraux.
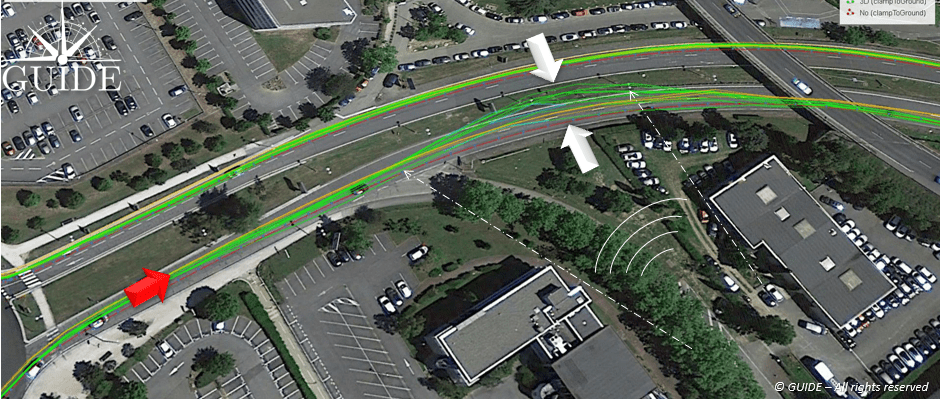
Figure 6 – Effet du brouillage des signaux GNSS sur des récepteurs sous l’effet d’interférents légers
JUSTESSE ET FIDÉLITÉ DES MESURES DE POSITION GNSS
Les récepteurs d’un même lot se comportent différemment en fonction des environnements traversés. Soumis à un multi-trajet net, ils convergent tous vers la même position erronée. Par contre, lorsque les phénomènes de propagation se complexifient avec de multiples diffractions, comme une réception sous des feuillages, tous les récepteurs déterminent leurs positions avec des erreurs différentes. Bien entendu, les environnements complexes combinent ces deux comportements.
Le premier comportement est Déterministe. Le vocabulaire de la métrologie fait référence au terme de Justesse de mesure pour : « Étroitesse de l’accord entre la moyenne d’un nombre infini de valeurs mesurées répétées et une valeur de référence ».
Le second comportement est NON Déterministe. La métrologie utilise alors le terme de Fidélité de mesure pour : « Étroitesse de l’accord entre les indications ou les valeurs mesurées obtenues par des mesurages répétés du même objet ou d’objets similaires dans des conditions spécifiées »
Les applications terrestres offrent souvent un panachage varié de milieux où les erreurs de « Justesse » et de « Fidélité » se cumulent. La considération de ces deux composantes est essentielle pour caractériser et étudier les performances d’un récepteur.
Distribution statique des différentes erreurs de position :
 GNSS-RR-Trueness-Precision-1")
Figure 7 – Combination d’erreurs Déterministes et NON Déterministes.
 RR-Accuracy-Only")
Figure 8 – La mesure unique d’une position en un point comporte 2 inconnues : Le poids des erreurs Déterministes (Trueness) par rapport à celles qui ne le sont pas ; Le taux de dispersion des erreurs des erreurs Non Déterministes (Precision).
 GNSS-RR-CDF")
Figure 9 – Répartitions statistiques des erreurs sur un parcours (scénario), c’est à dire le pourcentage des erreurs (Probability) par rapport à la somme des erreurs (absolues) inférieure à une précision donnée.
Ci-dessus, 95% des positions calculées lors d’un rejeu ont une précision meilleure que 1,5m ; cette même précision n’est atteinte qu’avec ~80% des positions calculées lors d’un autre rejeu – voir ligne verticale [d]. La ligne horizontale [e] illustre l’étalement de la précision horizontale en considérant 95% des positions de 2 rejeux : pour l’un, la précision affichée est ~1,5m, et pour l’autre elle est dégradée jusqu’à 3,5m. Cette courbe pointera toujours sur les mêmes repères [a], [b] et [c] préconisées par la norme EN16803-1 et correspondant à l’ensemble des mesures respectivement inférieures à 50%, 75% et 95%.
A titre d’exemple, l’évaluation d’un seul récepteur à bord d’un véhicule circulant dans un environnement urbain ne permet pas de dissocier ces 2 aptitudes. En effet, la dégradation des signaux détermine le degré de dispersion de la composante des mesures dites « aléatoires ». Ainsi chaque récepteur supplémentaire apportera une solution différente dans certains milieux. Or, les analyses d’une unique campagne sur site s’appuient sur un mono échantillon (trajectoire unique du terminal sous test), là où un panel de mesures serait indispensable. De fait, les statistiques disponibles s’avèrent insuffisantes pour caractériser un récepteur, même au prix de longues collectes.
Les essais en situation opérationnelle sont ainsi plutôt destinés aux tests d’intégrations finales.

Figure 10 – Visualisation de la combinaison d’erreurs Déterministe et Non déterministe, dans une rue bordée d’arbres d’un côté et d’habitations de l’autre
En opposition :
Un générateur de constellations synthétisera des signaux trop parfaits, et dans tous les cas, peu représentatifs de l’environnement réel. Les mesures seront alors seulement Déterministes, c’est à dire soumises à des erreurs systématiques. Une simulation répétée sur un même récepteur calculera toujours les mêmes mesures. Ce type de bancs d’essais offre, néanmoins, de nombreux avantages pour simuler des situations inobservables dans le monde réel.
Disparités des capacités d’analyses sur les erreurs de position à base de :
 GNSS-Resultats-typiques-ditération-1")
Figure 11 – Résultats typiques d’itération de mesures obtenues, respectivement de gauche à droite, avec des signaux synthétiques et ceux issues du monde réel
 GNSS-Resultats-typiques-ditération-2")
Chaque cas est formé d’erreurs de Justesse et de Fidélité. Cette dernière composante nécessite plusieurs mesures de la même configuration pour déterminer l’étendue potentielle des dispersions.
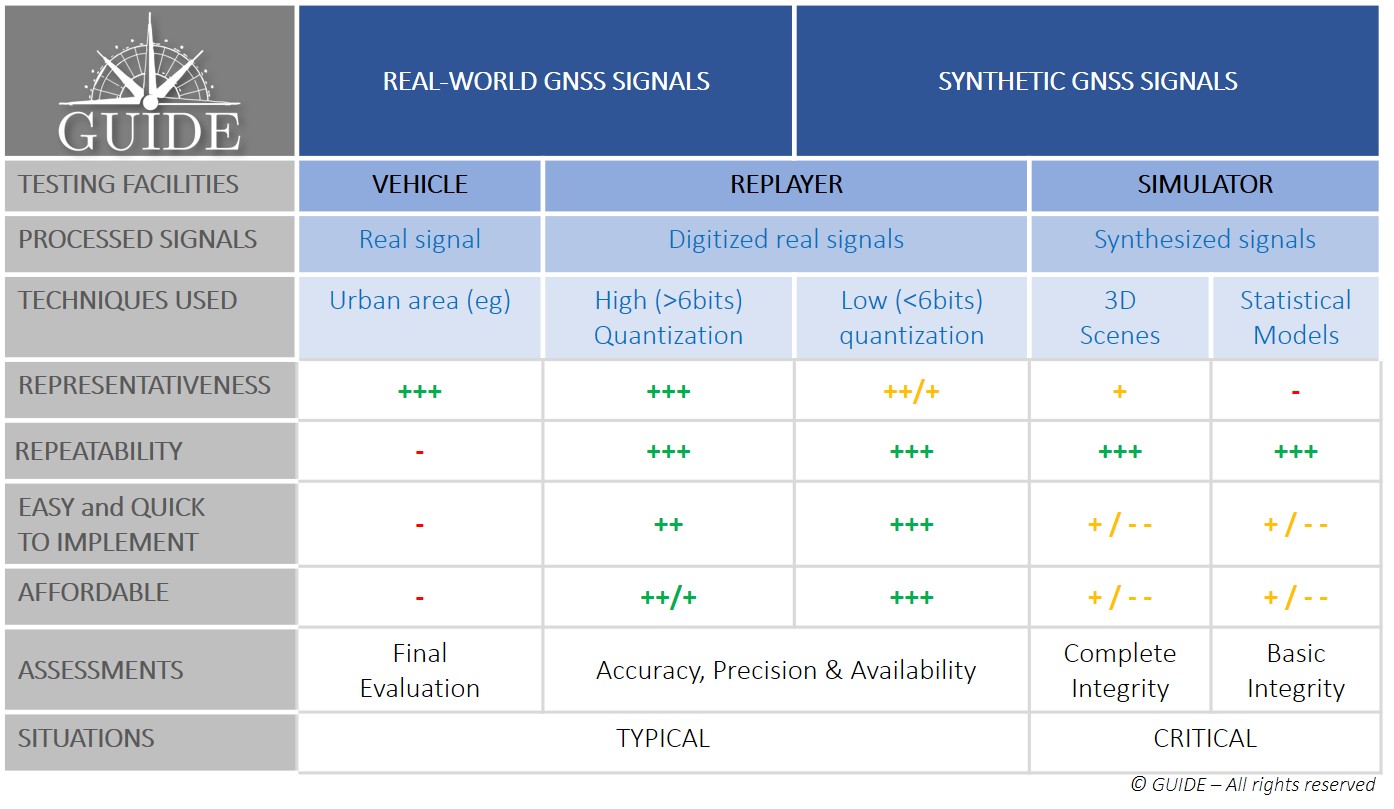
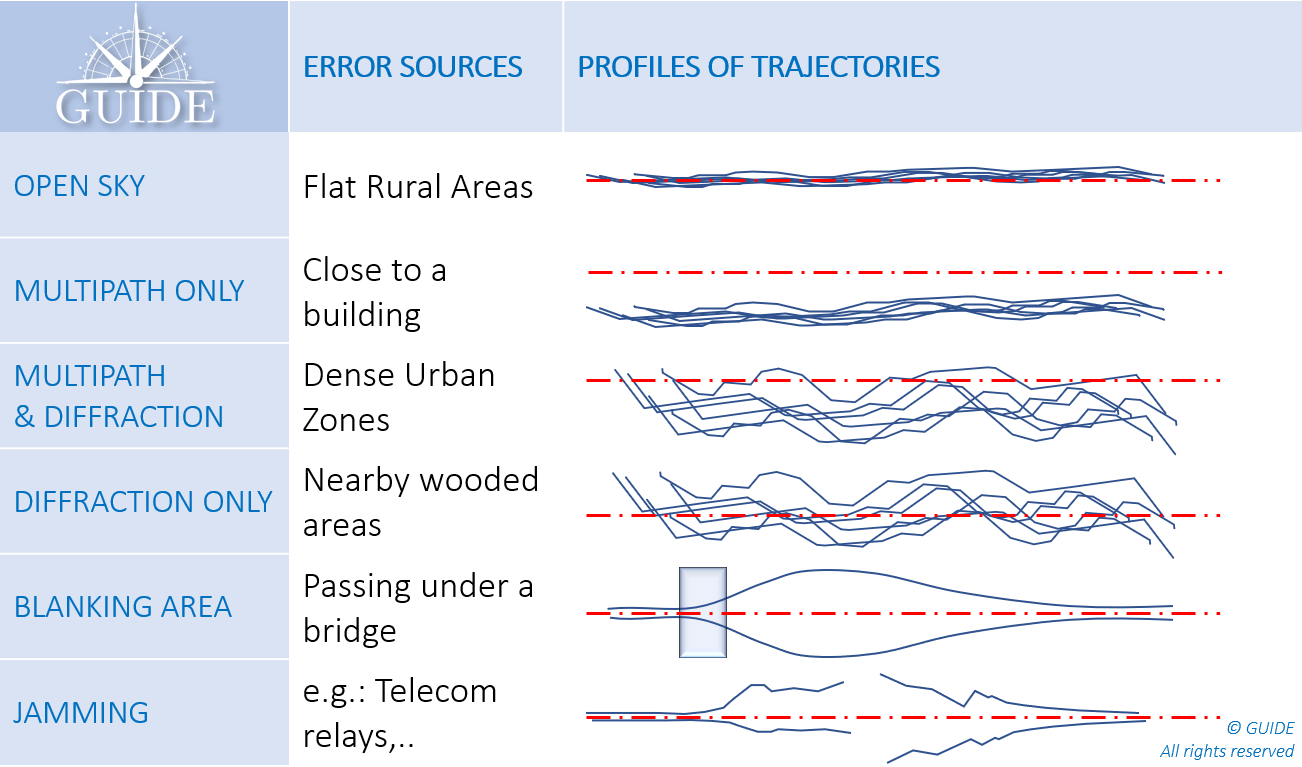
Figure 13 – Profils des erreurs de positions (trajectoire mesurées/DUT) en fonction des environnements traversés.
Qu’est ce que la MÉTROLOGIE GNSS
En première approche, la caractérisation des performances GNSS supposerait la mise en batterie de nombreux récepteurs à bord du même véhicule d’essais. Cette méthode est certes intéressante au stade expérimental, notamment pour comprendre l’impact des phénomènes de propagation sur les erreurs de positionnement. Toutefois, elle comporte des inconvénients majeurs sur le plan logistique et surtout sur les exigences métrologiques de base.
Pour disposer de mesures fiables et utiles, d’un point de vue opérationnel, les essais doivent être « Représentatifs » des milieux à traverser et « Reproductibles » pour vérifier les résultats et établir des comparaisons valables, par exemple entre 2 Terminaux, 2 Firmwares, 2 paramétrages, 2 antennes, voire entre 2 hybridations.
Dans ces conditions, les techniques de rejeux, souvent désignées par les 2 mots « Record and Replay », satisfont aux exigences attendues. Pour mémoire, cette méthode de métrologie consiste à numériser les signaux GNSS captés par l’antenne embarquée à bord du véhicule de définition, en prenant soin de collecter toutes les données associées aux essais (VIDEO, INS, DMI, NRTK,…) à commencer par la vérité terrain. Ainsi à l’issue de la campagne, les signaux GNSS et les autres données sont synchronisées et restituées sur un banc de rejeu constitué d’un « SDR replayer ».
Le rejeu d’un même scénario sur un récepteur permet de reproduire les conditions de l’enregistrement des données à l’identique. Chaque itération relève de nouvelles mesures, équivalente à une unité supplémentaire, virtuellement embarquée. La compilation des résultats met ainsi en évidence les erreurs Non déterministes, c’est-à-dire celles qui de par leur nature aléatoire se dégage des autres.
Des laboratoires d’essais, comme GUIDE-GNSS, conçoivent et commercialisent des données d’essais directement rejouables sur les principaux instruments de simulation capables de fonctionner dans les 2 modes : Simulations et Rejeux. Les configurations dédiées aux rejeux sont généralement beaucoup plus abordables que les imposants générateurs de constellation, structurellement plus complexes. De plus, la mise en œuvre des séances de rejeux est simple, rapide et ne nécessite aucune formation particulière.
Au-delà des scénarios réalisés sur demande, les bibliothèques disponibles couvrent déjà une multitude de cas, auparavant inaccessibles à un utilisateur isolé. Elles ouvrent ainsi la possibilité de tester des terminaux sous différentes latitudes avec des reliefs variés et des quartiers composés d’architectures typiques.
Enseignements à tirer des erreurs de positionnement
Le Centre National d’Etudes Spatiales (CNES) a financé plusieurs contrats de R&D pour sa mise au point et la validation de cette technique du rejeu (Record & Replay). D’ores et déjà, elle est recommandée par le CEN/CENELEC au travers de la série des normes EN16803 pour caractériser et classifier les performances des terminaux GNSS.
Cette méthodologie répond aux principes de base de la métrologie. Les conditions d’essais sont reproductibles et représentatives des conditions d’utilisation. Les mesurages sont répétables et donnent la possibilité d’analyser distinctement les erreurs systématiques (Justesse) des erreurs aléatoires (Fidélité). Les incertitudes de mesures sont également établies avec précision.
Lors d’une campagne de mesure sur site, les distributions statistiques de 2 récepteurs identiques, embarqués à bord du même véhicule, aboutissent à des résultats différents. Ainsi, aucune caractérisation ne peut être établie à ce stade.
Sur un banc de rejeux après plusieurs itérations d’un même scénario, la valeur moyenne des mesures d’un récepteur sur une CDF finit par tendre vers une courbe caractérisant ses performances pour une série de situations données.
L’instrumentation dédiée aux opérations de rejeux est moins complexe et moins onéreuse. Les modèles statistiques de simulations sont remplacés par des scénarios de signaux GNSS préalablement numérisés sur le terrain ou sur des générateurs de constellation. Ainsi, qu’ils soient issus d’un environnement réel ou synthétique, ces signaux GNSS sont restitués facilement en réduisant drastiquement les temps de préparation et d’exécution. Les avantages économiques de cette technique de tests apparaissent maintenant évidents et favorisent son adoption par les industries du transport.